E-Catalog
Introduction
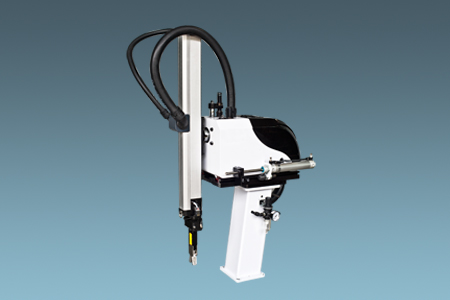
The SS series robot is designed for rapid and precise removal of sprue or runner from injection moulding machine, and place them into granulator for recycling. Simple product removal is applicable with optional vacuum generator and EOAT. Suitable for injection moulding machine under 250t clamping force.
-
Features
-
Arm Mechanism
The arm mechanism is integrated with branded pneumatic cylinder, efficient shock absorber, drop proof locking mechanism, compact and adjustable gripper, self clean plastic bearing, 90o wrist rotation mechanism and gripper sensor.
-
Swing Mechanism
Employs rack and pinion system which converts linear motion to rotation with least damage to the cylinders. The shock absorber and angle tuning system provides a smooth and precise swing motion.
-
Kick Stroke Mechanism
Employs heavy duty linear rail and ball bearing, pneumatic cylinder with adjustable speed and displacement and shock absorber.
-
Base Mechanism
Fast mold changing design provides simple method for changing molds. The base is rotatable for 90o degree by releasing the handle.
-
Pneumatic Circuit
Branded pneumatic accessories provide extensive use life. Removable electric circuit stands allows easy maintenance.
-
Control System
Dialogic hand controller provides English, Japanese, Traditional Chinese and Simplified Chinese. Other languages are applicable; up to 8 different languages can be stored. There are 8 standard programs and memory for up to 80 customized programs with self fault detection. Swing directions are adjustable simply by flipping the switch on the control board. Position limit sensors are applied to all moving directions in order to provide safety mechanically and electrically. Extra 4 sets of I/O pins are available for other applications. Designed to EUROMAP 12, EUROMAP 67 and SPI to provide plug and use.